
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

เทคโนโลยีการหลอกลวงการนำทางด้วยโดรน
โดยทั่วไปแล้วโดรนกำหนดเป้าหมายการหลอกลวงการนำทางหมายถึงการใช้วิธีการทางเทคนิคบางอย่างเพื่อแทรกข้อมูลการนำทางที่เป็นภัยคุกคามปลอมเข้าไปในโดรนที่ผิดกฎหมาย ส่งผลให้ระบบนำทางด้วยดาวเทียมของโดรนระบุตำแหน่งอย่างไม่ถูกต้อง และทำให้การวางแผนเส้นทางและการควบคุมการบินไม่ถูกต้อง จึงบรรลุผลสำเร็จ จุดประสงค์ในการขับโดรนออกไปหรือบังคับลงจอด ณ สถานที่ที่กำหนด เนื่องจากในปัจจุบันโดรนกระแสหลักใช้ระบบนำทางด้วยดาวเทียมทั่วโลก(GNSS) ซึ่งเป็นแหล่งข้อมูลการนำทางหลัก เทคโนโลยีการหลอกลวงการนำทางสามารถส่งผลกระทบต่อโดรนเกือบทั้งหมด โดยเฉพาะโดรนพลเรือน และมีการนำไปประยุกต์ใช้ได้ดี ในการใช้งานจริง อุปกรณ์แนะนำการนำทางด้วยโดรนภาคพื้นดินโดยทั่วไปจะส่งสัญญาณหลอกนำทางที่มีความคล้ายคลึงกับสัญญาณ GNSS ของโดรนจริง ทำให้ผู้ใช้ที่เกี่ยวข้องต้องรับและคำนวณสัญญาณนำทางหลอกดังกล่าวที่สถานีรับสัญญาณ ส่งผลให้โดรนได้รับสัญญาณเท็จ ข้อมูลตำแหน่ง ความเร็ว และเวลาภายใต้สภาวะที่ซ่อนอยู่และไม่สามารถตรวจจับได้อย่างมีประสิทธิภาพ ควรชี้ให้เห็นว่าการหลอกลวงในการนำทางแตกต่างจากการรบกวนในการนำทาง การรบกวนการระงับการนำทางโดยทั่วไปจะใช้อุปกรณ์ส่งสัญญาณรบกวนกำลังสูงในการส่งสัญญาณการระงับประเภทต่างๆ ทำให้เครื่องรับเป้าหมายไม่สามารถรับสัญญาณการนำทางปกติได้ และผู้ใช้ไม่สามารถรับผลลัพธ์การนำทาง ตำแหน่ง และเวลา ส่งผลให้ระบบนำทางไม่พร้อมใช้งาน เนื่องจากความจริงที่ว่าการหลอกลวงการนำทางมักไม่ต้องการกำลังส่งที่แรงเกินไป มีการปกปิดที่ดี และสามารถแนะนำผู้ใช้ที่เกี่ยวข้องให้นำทางไปในทางที่ผิดได้ในระดับหนึ่ง นอกจากนี้ยังทำให้การหลอกลวงการนำทางมีผลการใช้งานที่ดีในทางปฏิบัติ


ปัจจุบันมีเทคโนโลยีหลอกลวงการนำทางหลักสองเทคโนโลยีสำหรับโดรน:
1) การส่งต่อการหลอกลวง
ตามชื่อที่แนะนำ การหลอกลวงแบบส่งต่อหมายถึงการวางเครื่องรับ GNSS ไว้รอบเป้าหมายที่จะหลอกลวง การจัดเก็บและส่งต่อสัญญาณ GNSS จริงไปยังเป้าหมายเพื่อให้บรรลุผลของการหลอกลวง โดยทั่วไป เนื่องจากความล่าช้าในการมาถึงของสัญญาณเกิดขึ้นอย่างหลีกเลี่ยงไม่ได้ในระหว่างการรับสัญญาณ การจัดเก็บ การประมวลผล และการส่งต่อ สัญญาณรบกวนในการส่งต่อสามารถแบ่งออกเป็นการหลอกลวงการส่งต่อโดยตรง และการหลอกลวงการส่งต่อล่าช้า โดยขึ้นอยู่กับความล่าช้าของมนุษย์ในความล่าช้า เนื่องจากความจริงที่ว่าการหลอกลวงแบบส่งต่อติดขัดส่งต่อสัญญาณจริงโดยตรง นั่นหมายความว่าตราบใดที่สามารถรับสัญญาณปัจจุบันได้ การหลอกลวงก็สามารถดำเนินการได้ ดังนั้นจึงไม่จำเป็นต้องทราบโครงสร้างของรหัสเทียมสัญญาณล่วงหน้า โดยเฉพาะอย่างยิ่งหากไม่เข้าใจรายละเอียดการใช้งานเฉพาะของรหัส GPS M (Y) ดังนั้นสัญญาณ GPS ทางการทหารจึงสามารถถูกหลอกได้โดยตรง อย่างไรก็ตาม เนื่องจากความล่าช้าของสัญญาณหลอกลวงที่ส่งต่อไปยังเครื่องรับนั้นมากกว่าความล่าช้าของสัญญาณจริงที่มาถึงเสมอ เนื่องจากไม่สามารถเปลี่ยนโครงสร้างรหัสเทียมและมีเพียงค่าการวัดระยะทางหลอกในระหว่างกระบวนการหลอกลวง ความยืดหยุ่นในการควบคุมของการรบกวนการหลอกลวงไปข้างหน้าพร้อมกันค่อนข้างต่ำ มักจะต้องใช้กลยุทธ์การควบคุมการหน่วงเวลาไปข้างหน้าที่ซับซ้อนมากขึ้น และยังมีข้อ จำกัด บางประการเกี่ยวกับ ตำแหน่งการติดตั้งอุปกรณ์ส่งต่อ สำหรับเครื่องรับที่ได้รับการติดตามสัญญาณ GPS อย่างเสถียรแล้ว การรบกวนการหลอกลวงไปข้างหน้าจะมีผลเฉพาะเมื่อความล่าช้าระหว่างสัญญาณไปข้างหน้าและสัญญาณโดยตรงที่ศูนย์กลางเฟสของเสาอากาศตัวรับสัญญาณเป้าหมายน้อยกว่าหนึ่งชิปเนื่องจากเฟสรหัสเทียม นาฬิกาล้าหลังสัญญาณจริง นอกจากนี้ การวิจัยยังแสดงให้เห็นว่าเนื่องจากเครื่องรับ GPS มักจะได้รับสัญญาณดาวเทียมหลายรายการ (โดยปกติจะมากกว่า 10 ช่องสัญญาณ) จึงมักจำเป็นต้องรับและส่งต่อสัญญาณดาวเทียมหลายรายการในระหว่างการหลอกลวง อย่างไรก็ตาม ในทางปฏิบัติ หากใช้วิธีสถานีเดียวและเสาอากาศเดี่ยวในการส่งต่อ มักจะเป็นไปไม่ได้ที่จะส่งต่อสัญญาณดาวเทียมมากกว่าสี่ช่องสัญญาณ (ไม่รวมสี่ช่อง) พร้อมๆ กัน และจำเป็นต้องส่งต่อสัญญาณหลายรายการไปที่สถานีส่งต่อสถานีเดียว มักส่งผลให้มีสถานีส่งต่อจำนวนมาก สัญญาณการปลอมแปลงการส่งต่อก็ตรวจพบได้ง่ายเช่นกัน ดังนั้น การใช้การปลอมแปลงล่วงหน้าจึงมักถูกจำกัดในทางปฏิบัติ


(2) การหลอกลวงโดยกำเนิด
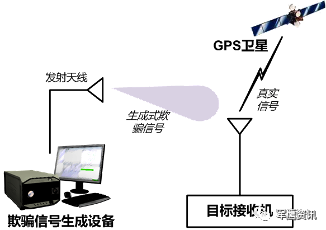
หลักการพื้นฐานของการหลอกลวงแบบกำเนิดคือการใช้อุปกรณ์หลอกลวงเพื่อคำนวณพารามิเตอร์ที่จำเป็นแบบเรียลไทม์ เช่น การหน่วงเฟสของโค้ด, ดอปเปลอร์ของผู้ให้บริการ, ข้อความการนำทาง ฯลฯ ของสัญญาณ GNSS ที่ผู้ใช้จำเป็นต้องได้รับในตำแหน่งผู้ใช้ที่คาดไว้ล่วงหน้า . จากนี้ สัญญาณ GNSS ปลอมจะถูกสร้างขึ้นที่จุดนั้นและแผ่ไปยังวัตถุหลอกลวงผ่านเสาอากาศส่งสัญญาณ ปิดบังสัญญาณ GNSS จริงด้วยข้อได้เปรียบด้านพลังงานของสัญญาณเท็จ ทำให้ค่อยๆ ติดตามและจับภาพเฟสรหัสเทียมที่ระบุ และ ผู้ให้บริการ Doppler ของสัญญาณหลอกลวง เพื่อให้เป้าหมายที่ถูกหลอกสามารถรับค่าการวัดช่วงหลอกที่ไม่ถูกต้อง จากนั้นคำนวณข้อมูลตำแหน่งที่ไม่ถูกต้อง ในที่สุดบรรลุวัตถุประสงค์ของการหลอกลวง หลักการพื้นฐานของวิธีนี้แสดงในรูปต่อไปนี้:
การหลอกลวงเชิงกำเนิดจำเป็นต้องมีความเข้าใจอย่างสมบูรณ์เกี่ยวกับโครงสร้างข้อมูลและความถี่ของสัญญาณ GNSS เช่น โครงสร้างรหัสเทียม ข้อความการนำทาง ฯลฯ ทำให้ยากต่อการปรับใช้การหลอกลวงเชิงกำเนิดกับสัญญาณรหัส P (Y) เนื่องจากความจริงที่ว่าการติดขัดการหลอกลวงแบบกำเนิดใช้อุปกรณ์ของตัวเองเพื่อสร้างสัญญาณการหลอกลวงและไม่ต้องพึ่งพาระบบ GNSS ฝ่ายหลอกลวงจึงสามารถกำหนดข้อความนำทางและเวลาในการส่งสัญญาณได้อย่างอิสระซึ่งทำให้สัญญาณหลอกลวงไปถึงเครื่องรับอย่างล่าช้าหรือล่าช้า หรือก่อนสัญญาณจริง ดังนั้นการรบกวนที่เกิดขึ้นสามารถหลอกลวงเครื่องรับเป้าหมายด้วยวิธีการต่างๆ เช่น การเปลี่ยนแปลงค่าการวัดการทดลองที่มาถึง และการแก้ไขข้อมูลชั่วคราว/ปูมดาวเทียม นอกจากนี้ เนื่องจากจริงๆ แล้วสัญญาณ GNSS เป็นสัญญาณสเปกตรัมกระจายลำดับโดยตรงที่ทำซ้ำในช่วงรหัสหนึ่งๆ การวิจัยจึงแสดงให้เห็นว่าสัญญาณการหลอกลวงแบบกำเนิดสามารถจับคู่เฟสรหัสกับสัญญาณจริงได้โดยอัตโนมัติภายในระยะเวลารหัสเทียมที่ยาวที่สุด (1 มิลลิวินาทีสำหรับสัญญาณ GPS L1 ) และดึงลูปการติดตามรหัสหลอกของผู้รับเพื่อติดตามสัญญาณหลอกลวงผ่านกำลังที่สูงกว่าสัญญาณจริงเล็กน้อย ในเวลาเดียวกัน เนื่องจากลักษณะการทำซ้ำแบบวนซ้ำของรหัสหลอกในสัญญาณการหลอกลวง หากการหลอกลวงไม่สำเร็จภายในหนึ่งรอบรหัสหลอก สัญญาณการหลอกลวงยังสามารถใช้แรงดึงโดยอัตโนมัติในรอบรหัสหลอกถัดไปจนกระทั่งผู้รับเป้าหมาย ได้รับการชี้แนะได้สำเร็จ เมื่อสัญญาณหลอกลวงดึงลูปการติดตามรหัสหลอกของเครื่องรับเป้าหมายได้สำเร็จ ฝ่ายที่รบกวนจะสามารถควบคุมเวลาและผลลัพธ์การวางตำแหน่งของเครื่องรับเป้าหมายได้โดยการปรับเฟสรหัสหลอกของสัญญาณหลอกลวงที่ส่ง ดังนั้นจึงบรรลุเป้าหมายในการหลอกลวงเป้าหมาย ผู้รับ ดังนั้นวิธีนี้จึงไม่มีข้อกำหนดสูงสำหรับสถานะปัจจุบันของผู้รับ มันสามารถหลอกลวงทั้งผู้รับในสถานะการจับและผู้รับในสถานะการติดตามสถานะคงที่ ดังนั้นการปฏิบัติจริงของการหลอกลวงแบบกำเนิดจึงมักจะแข็งแกร่งกว่า
เนื่องจากการใช้งานระบบนำทางด้วยดาวเทียมอย่างลึกซึ้งในด้านต่างๆ ของชีวิตทางสังคมและการใช้งานทางการทหาร เครื่องนำทางด้วยดาวเทียมที่รับสัญญาณผิดพลาดและการได้รับผลลัพธ์ด้านเวลาและตำแหน่งที่ไม่ถูกต้องอาจนำไปสู่ผลที่ตามมาที่เป็นหายนะ ดังนั้นจำนวนมาตรการรับมือโดรนโดยใช้เทคโนโลยีหลอกลวงการนำทางจึงเพิ่มขึ้นอย่างต่อเนื่อง เมื่อวันที่ 4 ธันวาคม พ.ศ. 2554 กองกำลังป้องกันทางอากาศของอิหร่านอ้างว่าพวกเขาใช้เทคโนโลยีหลอกลวงเพื่อยึดเครื่องบินลาดตระเวนไร้คนขับ "RQ-170" ของสหรัฐฯ ตามแนวชายแดนด้านตะวันออกของประเทศ หากรายงานนี้เป็นจริง จะเป็นการนำเทคโนโลยีหลอกลวงการนำทางมาใช้ครั้งแรกในมาตรการตอบโต้ของยานพาหนะทางอากาศไร้คนขับ ตามรายงานของสื่อ ในฐานะประเทศหลักในด้านเทคโนโลยีและอุปกรณ์สงครามอิเล็กทรอนิกส์ รัสเซียมีแนวโน้มสูงที่จะใช้เทคโนโลยีหลอกลวงอย่างกว้างขวางโดยกำหนดเป้าหมายไปที่ GPS ในช่วงไม่กี่ปีที่ผ่านมา จากข้อมูลของ C4ADS ซึ่งเป็นองค์กรไม่แสวงผลกำไรในสหรัฐอเมริกา ระบุว่าในช่วงไม่กี่ปีที่ผ่านมามีเหตุการณ์การหลอกลวง GPS ที่แตกต่างกันเกือบ 10,000 ครั้งในรัสเซีย โดยเฉพาะอย่างยิ่งเมื่อประธานาธิบดีปูตินรัสเซียไปเยือนพื้นที่ที่มีความละเอียดอ่อน สัญญาณ GPS หลอกลวงจะปรากฏขึ้นรอบๆ พวกเขา นอกจากนี้ องค์กรรายงานว่าในมอสโก โดยเฉพาะใกล้กับเครมลิน นักท่องเที่ยวมักพบสถานที่ของตนว่าเป็นสนามบินที่อยู่ห่างออกไป 32 กม. วิธีการนี้ของรัสเซียได้รับการยอมรับอย่างกว้างขวางว่าเป็นมาตรการป้องกันเพื่อหลีกเลี่ยงการโจมตีด้วยอาวุธนำทาง GPS ของ NATO การวิเคราะห์ชี้ให้เห็นว่ากองทัพรัสเซียสามารถป้องกันการโจมตีแบบคลัสเตอร์ด้วยโดรนโดยมุ่งเป้าไปที่ฐานทัพทหารของตนในซีเรียซ้ำแล้วซ้ำอีก ซึ่งอาจเกิดจากการใช้เทคโนโลยีหลอกลวง GPS บางส่วน